Atlas
Small Robot Project
Atlas Robot Platform
Table of Contents
- Overview
- Electrical Design
- Software Design
Overview
The Atlas Robot Platform is a system of custom electronics designed and built for educational proposes. The Atlas system features custom designed Electrical and low level Embedded systems design. The original purpose of this project was to bring together Mechanical, Electrical, and Software design for my Undergrad Capstone project, but it has since morphed into a single project focusing on Embedded systems design that soaks up more of my time as the project timeline expands exponentially.
Electrical Design
The electrical designs of this system consists of a custom battery monitoring circuit and a STM32 based flight controller.
Custom Power solution
Electrical Schematic of the power board can be found here: Link to PDF
The power solution consists of 2 18650 Li-Ion cells providing a total of ~7.4V for system use. A buck step down converter is used to drop the 7.5V down to 5V for MCU power.
Custom MCU solution
The original design of the MCU board is being held back by the never ending global IC Shortage, unable to source components for MCU and its supporting peripherals/ICs.
The original plan was to leverage the ease of the Arduino framework by developing a MCU board using the Atmega328P, however the Atmega series of MCUs are very difficult to source for small scale fabrication.
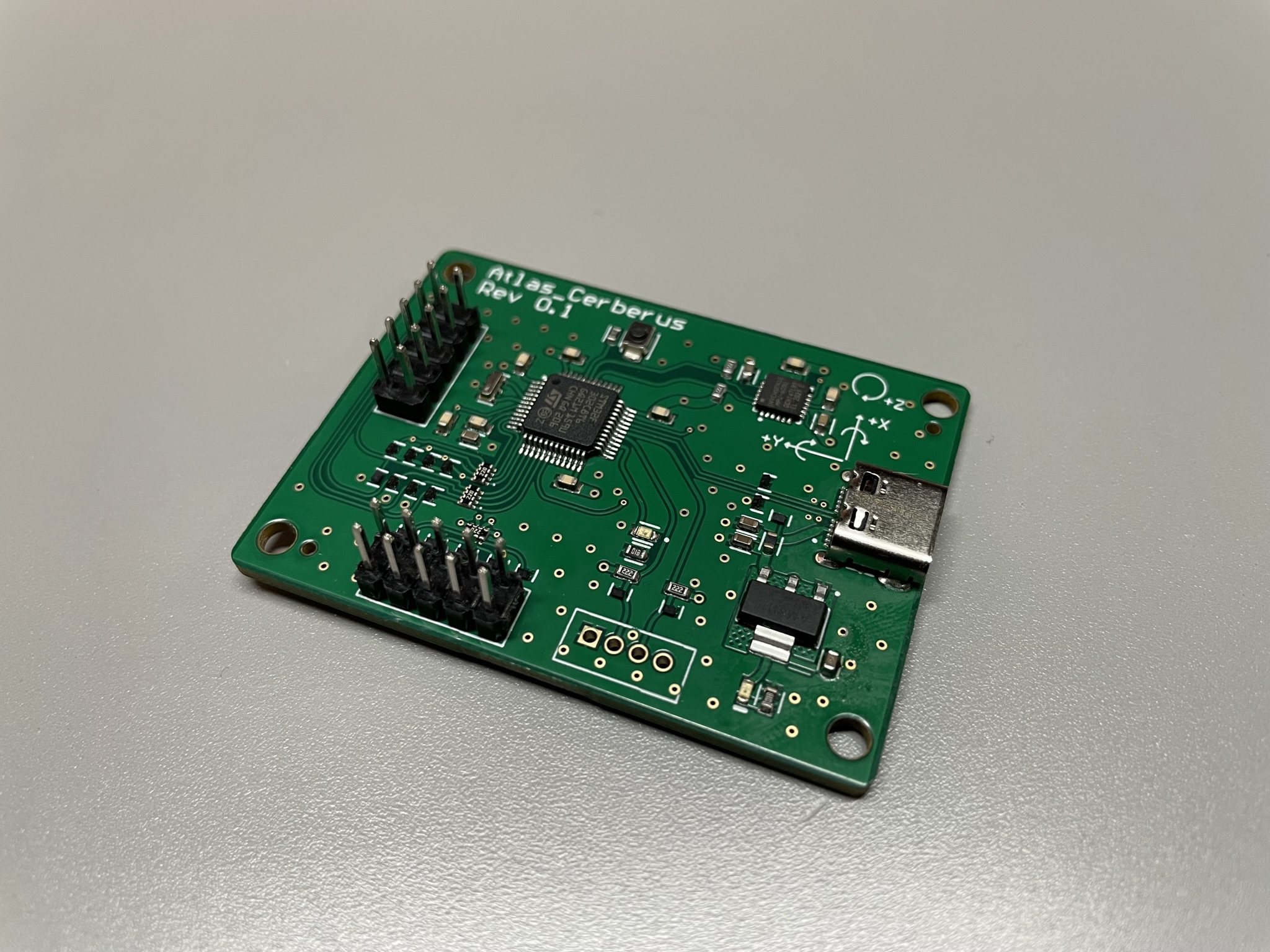
The plan has changed to center around the ever so popular STM32 family of Microcontrollers. The future design for the MCU can be found here: Link to PDF
Photos of the STM32 based MCU Board:
The Pin out of the Board is the following:
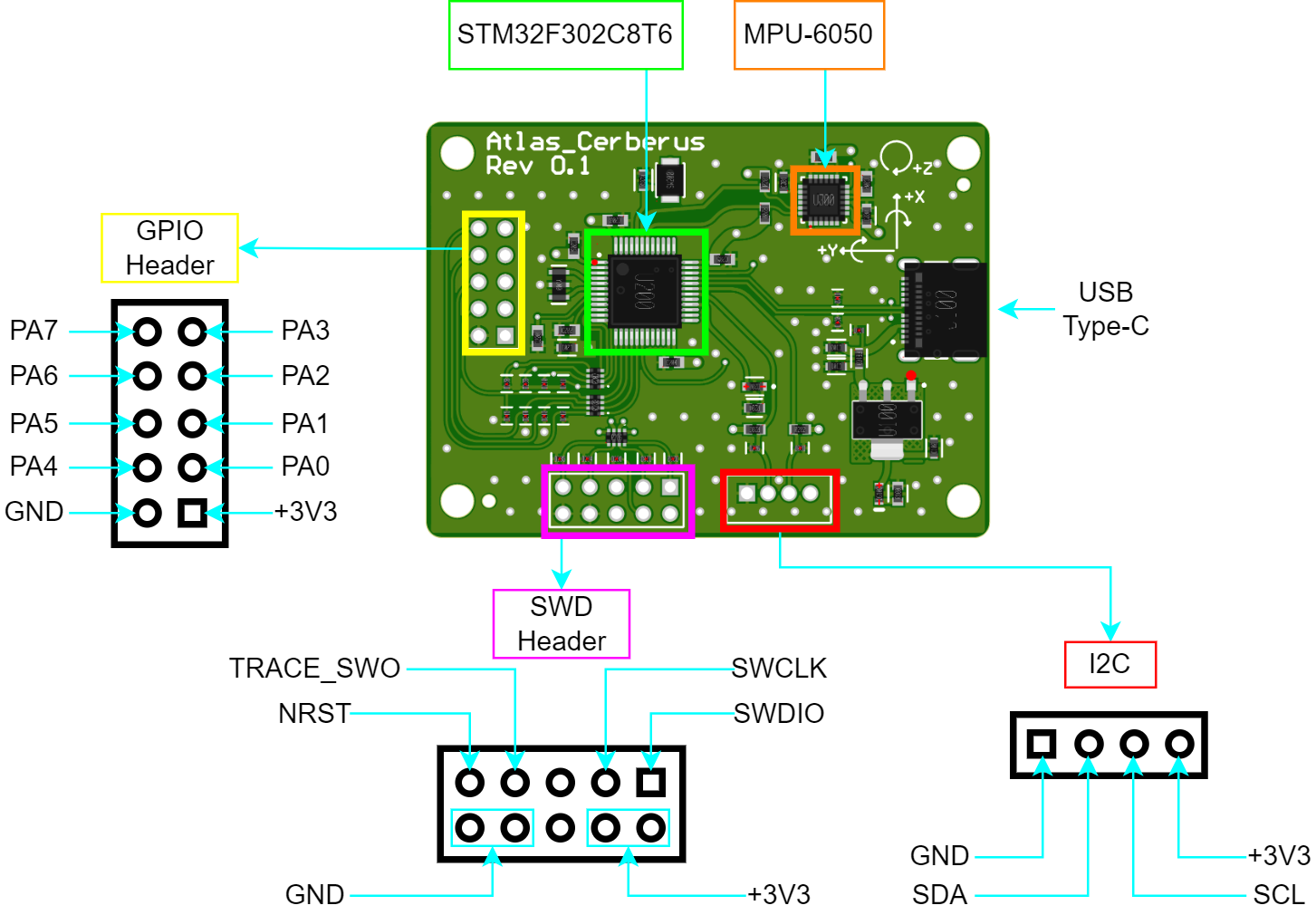
Revision 0.1 of this board is a Proof of Concept, Revision 1.0 will feature a PWM driver as well as a smaller board size.
Software Design
The current plan is to split the system into two distinct computers, the Navgiation Computer and the Flight Control Computer. The Navigation computer is in charge of calculating the current position of the system and also creating control inputs for the Control Computer.
The Control Computer on the other hand, only has the bare minimum required hardware to keep the system stable during flight, its main purpose is to talk direct to the ESCs and the battery board to keep the

Sensors & Filters
Currently the MCU has a MPU-6050 IMU on board, which features a 3-axis accelerometer and 3-axis gyroscope. The IMU data is currently going through a Kalman filter in order to estimate a better orientation.